Design of a Dynamic Obstacle Avoidance System for Greenhouse Robots Based on the Fusion of YOLOv5 and Ultrasonic Sensing
Keywords:
Greenhouse Robot, Dynamic Obstacle Avoidance, YOLOv5, K230Abstract
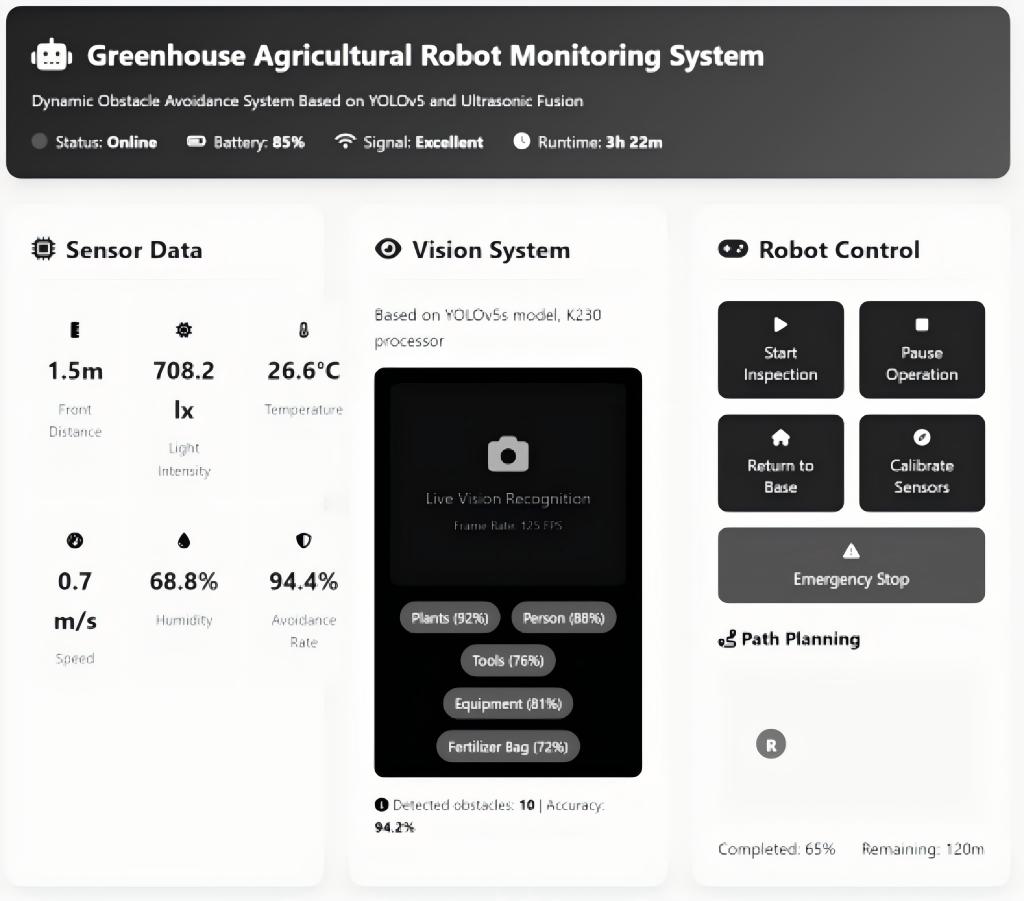
To address the limitations of single-sensor obstacle avoidance in greenhouse environments characterized by complex lighting and diverse obstacle morphologies, this study proposes and implements a dynamic obstacle avoidance system based on the fusion of visual and ultrasonic multi-sensor information. The system employs an STM32F407 microcontroller as the real-time control core and a Canaan K230 edge AI processor as the dedicated visual processing unit, constructing a hardware platform that integrates a lightweight YOLOv5s model, multiple ultrasonic sensors, and a dual-track drive module. The model is trained and converted using "VSCode + PyTorch," while embedded software programming is accomplished with "Keil MDK + CanMV IDE," enabling a complete implementation from algorithm to hardware. This paper achieves a complementary advantage of long-range observation and short-range avoidance by fusing semantic recognition results with rangig data in real-time on the STM32. Experimental validation in a simulated greenhouse environment demonstrate that the proposed fusion system attains an obstacle avoidance success rate of 94%, with an average decision response time of 305 milliseconds, representing a significant performance enhancement over single-sensor solutions. This research provides a low-cost, robust, and practical solution for autonomous navigation of mobile robots in greenhouses.
References
Kumar, S., Mohan, S., & Skitova, V. (2023). Designing and implementing a versatile agricultural robot: A vehicle manipulator system for efficient multitasking in farming operations. Machines, 11(8), 776.
Belforte, G., Deboli, R., Gay, P., Piccarolo, P., & Aimonino, D. R. (2006). Robot design and testing for greenhouse applications. Biosystems Engineering, 95(3), 309-321.
Miao, C., Chen, G., Yan, C., & Wu, Y. (2021). Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Computers & Industrial Engineering, 156, 107230.
Luo, Q., Wang, H., Zheng, Y., & He, J. (2020). Research on path planning of mobile robot based on improved ant colony algorithm. Neural Computing and Applications, 32(6), 1555-1566.
Wei, B., Liu, J., Li, A., Cao, H., Wang, C., Shen, C., & Tang, J. (2024). Remote distance binocular vision ranging method based on improved YOLOv5. IEEE Sensors Journal, 24(7), 11328-11341.
Yihai, Z., Kai, Z., Xianyi, K., Jiawen, P., Yipeng, Z., & Yujun, H. (2023). Design And Research Of Underwater Pipeline Cleaning Robot [J]. Mechanical Management Development, 38(2), 110-112.
Zhou, B. F., & Zhang, J. L. (2020). Design of DC Motor PID Control System Based on STM32 Single Chip Microcomputer. International Core Journal of Engineering, 6(7), 62-67.
Jin, Y., Li, S., Li, J., Sun, H., & Wu, Y. (2018, July). Design of an intelligent active obstacle avoidance car based on rotating ultrasonic sensors. In 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER) (pp. 753-757). IEEE.
Zhu, X. (2021, August). Design of barcode recognition system based on YOLOV5. In Journal of physics: conference series (Vol. 1995, No. 1, p. 012052). IOP Publishing.
Wang, Z., Wu, Y., & Niu, Q. (2019). Multi-sensor fusion in automated driving: A survey. Ieee Access, 8, 2847-2868.