Obstacle Avoidance Path Planning for Robotic Arm Based on Improved RRT Algorithm
Keywords:
RRT* Algorithm, RRT Algorithm, Obstacle Avoidance Path Planning, Six-axis Robotic Arm, Sampling Optimization, B-spline CurveAbstract
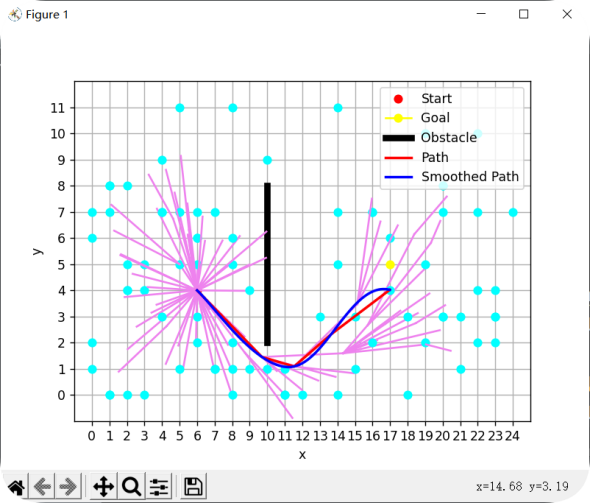
The Rapidly-exploring Random Tree (RRT) algorithm and its variant, RRT*, are commonly used for robotic arm path planning but suffer from high randomness, non-optimal paths, and low efficiency. To address these issues, this paper proposes an improved RRT* algorithm that incorporates a goal-biased sampling strategy and cubic B-spline curve fitting. The method defines and dynamically restricts the search area during tree expansion to improve planning efficiency and goal orientation. Subsequently, cubic B-spline fitting is applied to smooth the path and reduce redundant nodes. Simulation experiments conducted in Python demonstrate that compared to traditional RRT and RRT* algorithms, the proposed approach generates shorter paths with fewer nodes and higher planning success rates, validating its effectiveness for robotic arm obstacle avoidance path planning.
References
Kaya, O., & Tingelstad, L. (2024, July). Comparison of RRT, APF, and PSO-Based RRT-APF (PS-RRT-APF) for collision-free trajectory planning in robotic welding. In 2024 10th International Conference on Control, Decision and Information Technologies (CoDIT) (pp. 2639-2644). IEEE.
Liu, Y., & Zuo, G. (2020, August). Improved RRT path planning algorithm for humanoid robotic arm. In 2020 Chinese Control And Decision Conference (CCDC) (pp. 397-402). IEEE.
Liang, J., Luo, W., & Qin, Y. (2024). Path Planning of Multi-Axis Robotic Arm Based on Improved RRT∗. Computers, Materials & Continua, 81(1).
Yao, F. E. N. G., Zhifeng, Z. H. O. U., & Yichun, S. H. E. N. (2023). Obstacle avoidance path planning based on improved RRT algorithm. Chinese J. Eng. Design, 30(06), 707-716.
JIANG, Q. L., & XU, J. (2025). Application of Improved PSO-PH-RRT* Algorithm in Intelligent Vehicle Path Planning. Journal of Northeastern University (Natural Science), 46(3), 12.
Haoduo, J. I. A., Lijin, F. A. N. G., & Huaizhen, W. A. N. G. (2025). Adaptive path planning of manipulators combining Informed-RRT* with artificial potential field. Computer Integrated Manufacturing System, 31(4), 1179.
SUN, Z., CHENG, J., BI, Y., ZHANG, X., & SUN, Z. (2025). Robot path planning based on a two-stage DE algorithm and applications. Journal of Southeast University (English Edition), 41(2).
Zhang, Y., & Chen, P. (2023). Path planning of a mobile robot for a dynamic indoor environment based on an SAC-LSTM algorithm. Sensors, 23(24), 9802.
Xia, X., Li, T., Sang, S., Cheng, Y., Ma, H., Zhang, Q., & Yang, K. (2023). Path planning for obstacle avoidance of robot arm based on improved potential field method. Sensors, 23(7), 3754.