Design of an Adaptive Stair-Climbing Robot Based on Heterogeneous Dual-Core Intelligent Control Technology
Keywords:
Adaptive Stair-climbing Robot, Heterogeneous Dual-core Control, Multi-Sensor Fusion, PID ControlAbstract
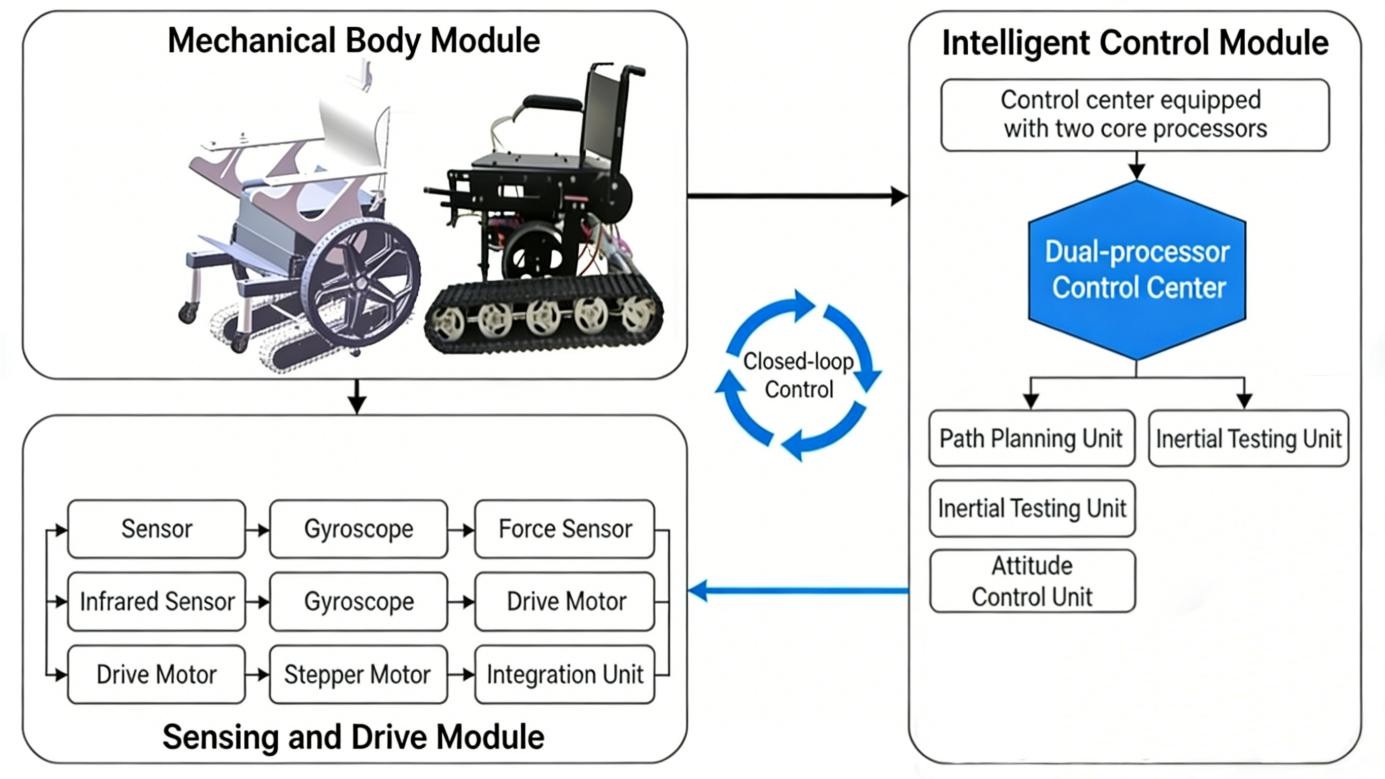
With the deepening trend of societal aging, the demand for mobile robots in scenarios such as elderly assistance, disability aid, logistics, and rescue is growing. Navigating stairs in complex, unstructured environments has become a key challenge in robotics. Traditional wheeled, tracked, or legged robots suffer from weak adaptability, insufficient stability, or high cost. This paper designs an adaptive stair-climbing robot utilizing a heterogeneous dual-core control architecture built with an STM32H743 microcontroller and a Raspberry Pi 4B. It integrates multiple sensors including an RGB-D camera, an Inertial Measurement Unit (IMU), and encoders. The Raspberry Pi 4B serves as the upper-layer intelligent decision-making core, performing planning and decision-making through fuzzy logic and Model Predictive Control (MPC). The STM32H743 acts as the lower-layer real-time control core, achieving precise execution via PID control. The robot can adapt to stairs with slopes of 30°–45° and step heights of 150–200 mm made of different materials, maintaining a stability margin of no less than 20 mm during climbing. Compared to traditional tracked robots, the stability margin is improved by over 35%. The robot demonstrates good stability and robustness in various stair environments, providing an innovative technical approach for mobile robots in complex terrains.
References
Luo, W., Zhang, C., et al. (2025). 移动机器人路径规划算法体系综述与展望 [A Review and Future Outlook of Path Planning Algorithm Systems for Mobile Robots]. Computer Engineering and Applications, 1-18. https://link.cnki.net/urlid/11.2127.TP.20251230.1853.014.[in Chinese]
Song, X., Zhang, Y., Dong, T., & Li, F. (2025). DHRN: A robot autonomous navigation method in crowds based on heterogeneous framework. Neurocomputing, 132375.
Shen, Z., Wang, R., Wang, L., Lu, W., & Wang, W. (2025). Application Research on General Technology for Safety Appraisal of Existing Buildings Based on Unmanned Aerial Vehicles and Stair-Climbing Robots. Buildings, 15(22), 4145.
Shao, C. (2025). 基于STM32H743的无刷直流电机FOC自动化控制系统设计 [Design of an FOC Automatic Control System for Brushless DC Motors Based on STM32H743]. Automation & Instrumentation. (09), 73-77. https://doi.org/10.14016/j.cnki.1001-9227.2025.09.073.[in Chinese]
Yang, D. (2024). 消防爬楼运输机器人研究与设计 [Research and Design of a Fire-Fighting Stair-Climbing Transport Robot]. Modern Manufacturing Technology and Equipment, 60(12), 84-86. https://doi.org/10.16107/j.cnki.mmte.2024.0840.[in Chinese]
Zhao, J. (2024). 基于多传感器融合的地面移动机器人定位方法研究 [Research on Positioning Methods for Ground Mobile Robots Based on Multi-Sensor Fusion]. Chongqing University. https://doi.org/10.27670/d.cnki.gcqdu.2024.001574.[in Chinese]
Zheng, P. (2023). 基于多传感器融合的移动机器人定位和路径规划方法研究 [Research on Positioning and Path Planning Methods for Mobile Robots Based on Multi-Sensor Fusion]. Southeast University. https://doi.org/10.27014/d.cnki.gdnau.2023.004282.[in Chinese]
Xiao, Y. (2023). 可重构移动机器人多模态运动控制关键技术研究 [Research on Key Technologies of Multi-Modal Motion Control for Reconfigurable Mobile Robots]. Chongqing University. https://doi.org/10.27670/d.cnki.gcqdu.2023.002758.[in Chinese]
Su, L., Zhang, L., Shao, J., et al. (2023). 楼梯清洁机器人的爬楼规划研究[Research on Stair-Climbing Path Planning for Stair-Cleaning Robots]. Journal of Jiangxi Normal University (Natural Science Edition), 47(1), 77-81. https://doi.org/10.16357/j.cnki.issn1000-5862.2023.01.10. [in Chinese]
Zhang, J., Wang, Z., Zhang, Y. (2022). ADAMS的电梯载荷测试机器人稳定性仿真 [Stability Simulation of Elevator Load Testing Robots Based on ADAMS]. Mechanical Management and Development. 37(07), 11-14. https://doi.org/10.16525/j.cnki.cn14-1134/th.2022.07.004.[in Chinese]
Chen, Y., Li, Y. (2022). 驱动式多功能助老爬楼机设计 [Design of a Driven Multi-Functional Stair-Climbing Machine for Elderly Assistance]. Development & Innovation of Machinery & Electrical Products. 35(04), 54-56.
Li, R., Xiao, Z., Chen, G. 基于曲柄摇杆机构的多足爬楼机器人设计 [Design of a Multi-Legged Stair-Climbing Robot Based on a Crank-Rocker Mechanism]. Modern Manufacturing Technology and Equipment. 58(07), 70-72. https://doi.org/10.16107/j.cnki.mmte.2022.0468.[in Chinese]
Sun, S., Zhai, Z., Chen, L., et al. (2026). 基于Arduino的老人和儿童家庭服务机器人[A Home Service Robot for the Elderly and Children Based on Arduino]. Mechanical & Electrical Engineering Technology. 1-8. https://link.cnki.net/urlid/44.1522.TH.20251217.1623.003.
He, L., Chen, Y., Qi, J. (2025). 基于激光雷达-IMU双层耦合的移动机器人位姿估计 [Mobile Robot Pose Estimation Based on LiDAR-IMU Double-Layer Coupling]. Computer Applications and Software. 42(12), 65-70.
Duan, H. (2025). 基于多传感器数据融合的工业机器人运动路径规划研究 [Motion Path Planning for Industrial Robots Based on Multi-Sensor Data Fusion]. Die & Mould Manufacture. 25(12), 198-200. https://doi.org/10.13596/j.cnki.44-1542/th.2025.12.067.[in Chinese]