Design of serial multi-motor communication scheme based on CAN bus master-slave architecture
Keywords:
Communication protocol design, Serial communication mechanism, Network topology, Motor control system, CAN communicationAbstract
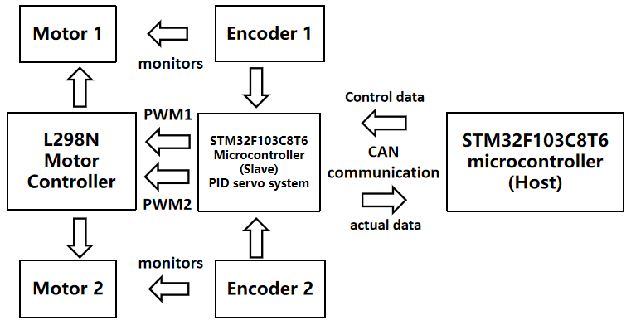
Motor control is closely related to daily life; however, challenges often arise in achieving accurate control and portability of multiple motors. By modularizing motor control, adopting a CAN bus master-slave architecture, and integrating a built-in PID-controlled servo system, the system enables modular configuration to select the number of motors controlled and accurately manages the state of each motor via the host, thereby improving the precision and portability of multi-motor control. This paper presents the system architecture, hardware design, and code implementation of a serial multi-motor communication program based on a CAN bus master-slave architecture. The system employs the STM32F103C8T6 microcontroller as the main control chip, the TJA1050 chip for the CAN bus, and the L298N chip for motor control. Additionally, the system features an interactive interface that enables real-time data monitoring and fine-tuning parameter adjustments. Therefore, the serial multi-motor communication program based on the CAN bus master-slave architecture holds significant practical value for applications in industrial machinery.