Design of an Intelligent Disinfection Doormat Based on the Unity of Function and Form
Keywords:
Intelligent Disinfection Doormat, Unity of Function and Form, STM32F103 Microcontroller, Finite Element Analysis, Automatic SensingAbstract
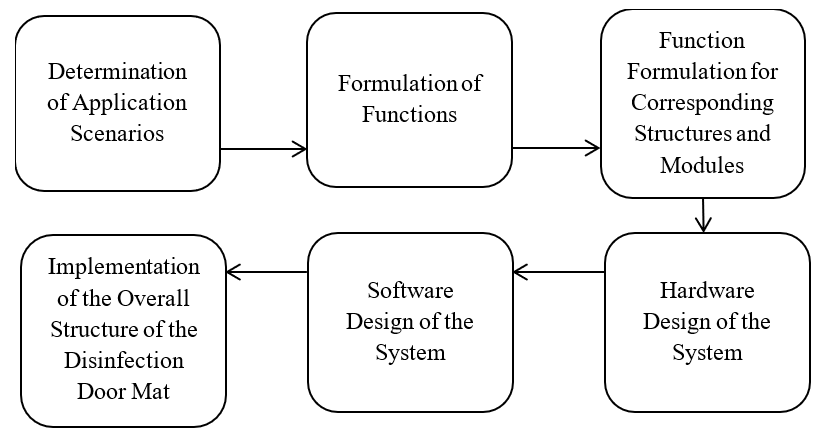
Public places often experience high human traffic, which can easily lead to cross-infection of various viruses. To prevent cross-infection, this study employs the "unity of function and form" design principle to develop an intelligent disinfection doormat suitable for scenarios such as hotels. Based on the requirements of hotel scenarios, the system functions, including intelligent sensing, automatic disinfection, and wireless communication, were first determined. Subsequently, using the STM32F103 microcontroller as the main controller, the hardware system integrating a stress sensor module, an alcohol atomization disinfection module, a Bluetooth communication module, and a display module was designed, culminating in the final three-dimensional structural model. The software workflow was then designed, realizing closed-loop control from human detection to automatic disinfection. Finally, simulations using finite element analysis software verified the doormat's static strength, fatigue performance, and modal characteristics. The results indicate that this design effectively integrates the disinfection function with the doormat form, achieving an efficient, intelligent, and low-maintenance entry disinfection solution with promising application prospects. Attention: I will incorporate the note regarding the Bluetooth module interface for future mobile app monitoring expansion.
References
Lu, W. T., Xu, X. N., & Yao, T. T. (2022). Design of an intelligent laboratory disinfection robot based on machine vision. Industrial Control Computer, 35(11), 65–66, 72.
Wang, R. X., & Xu, Y. L. (2023). Multi-strategy intelligent disinfection robot based on risk area division. Electronic Manufacturing, 31(19), 52–54, 96.
Wang, W., Wang, Y., Zhang, Y., et al. (2024). Research on navigation system of intelligent disinfection robot mobile platform. Mechanical Design and Manufacturing, (11), 346–350, 357.
Xiao, Y. L., Yang, L., Shu, C., et al. (2025). Design of an intelligent spray disinfection system based on PLC and Internet of Things. Journal of Huanggang Normal University, 45(5), 32–38.
Mao, B., Wang, H., & Zhang, J. C. (2020). Product form design. Electronic Industry Press.
Gao, J. R., Yu, F. S., & Wei, C. H. (2025). Simulation tank control device based on STM32F103. Mechanical Engineer, (9), 52–54, 59.
Xu, A. H., Dai, G. H., Hu, H. B., et al. (2024). Research on dynamic characteristic calibration method of resistive strain sensors. Metrology Science and Technology, 68(4), 26–30.
Zhang, Q., Guo, F. X., Zhou, S. D., et al. (2025). Evaluation of disinfection effect of aerosolized hydrogen peroxide disinfection robot in negative pressure isolation wards. Chinese Journal of Disinfection, 42(3), 224–226.
Peng, S. H. (2025). Research on DLP projection systems with LED and LED-LD hybrid light sources [Master’s thesis, University of Electronic Science and Technology of China].
Wang, L., Dong, X. H., & Cao, C. (2025). Modal analysis and design of a rubber tapping machine based on finite element method. Agricultural Equipment & Vehicle Engineering, 63(6), 17–20.